Sidebar
This is an old revision of the document!
Table of Contents
Thermal Imaging
Thermal camera transmits udp packets to a windows application.
TODO
capture udp packetsanalyze for handshake and framecross platform image stream decoding- find camera's conversion formula or lookup table OR calibrate
grab calibration data- get min max value and saturation points
- normalize, colorize and manipulate 16bit image
- Live streaming
- web interface
- Mobilility (battary, SOB)
flow
we recorded a raw ethernet packet stream between the camera (source) and the windows (target) pc
bootloginplay.zip - pcap file recording of camera boot, stream request follwed by ~100 frames of thermal video. we used wireshark to filter and capture the handshake.
we noticed the stream gets initiated by a short udp packet from the target
we saved that packet and replayed it to the source using scapy lib for python.
#replay the "trigger" packet. #this packets will start the source broadcasting its packets. import base64 from scapy.all import * # Base64 encoded packet data encoded_packet = "////////AAFsWfAKCABFAAA4KB0AAIARkEfAqAABwKgA/x+bH5wA2QAAASABgBtAACAAAAAAAAAADwAAAAEAAAEAACArAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAP//////////////////////////////////////////AAAAAAAAAAIBAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAA" # Decode the Base64 encoded packet decoded_packet = base64.b64decode(encoded_packet) # Load packet with Scapy packet = Ether(decoded_packet) # (packet) sendp(packet, iface="Ethernet")
this then started a network stream
the data stream was ordered and looked clean.
every frame starts with the following.
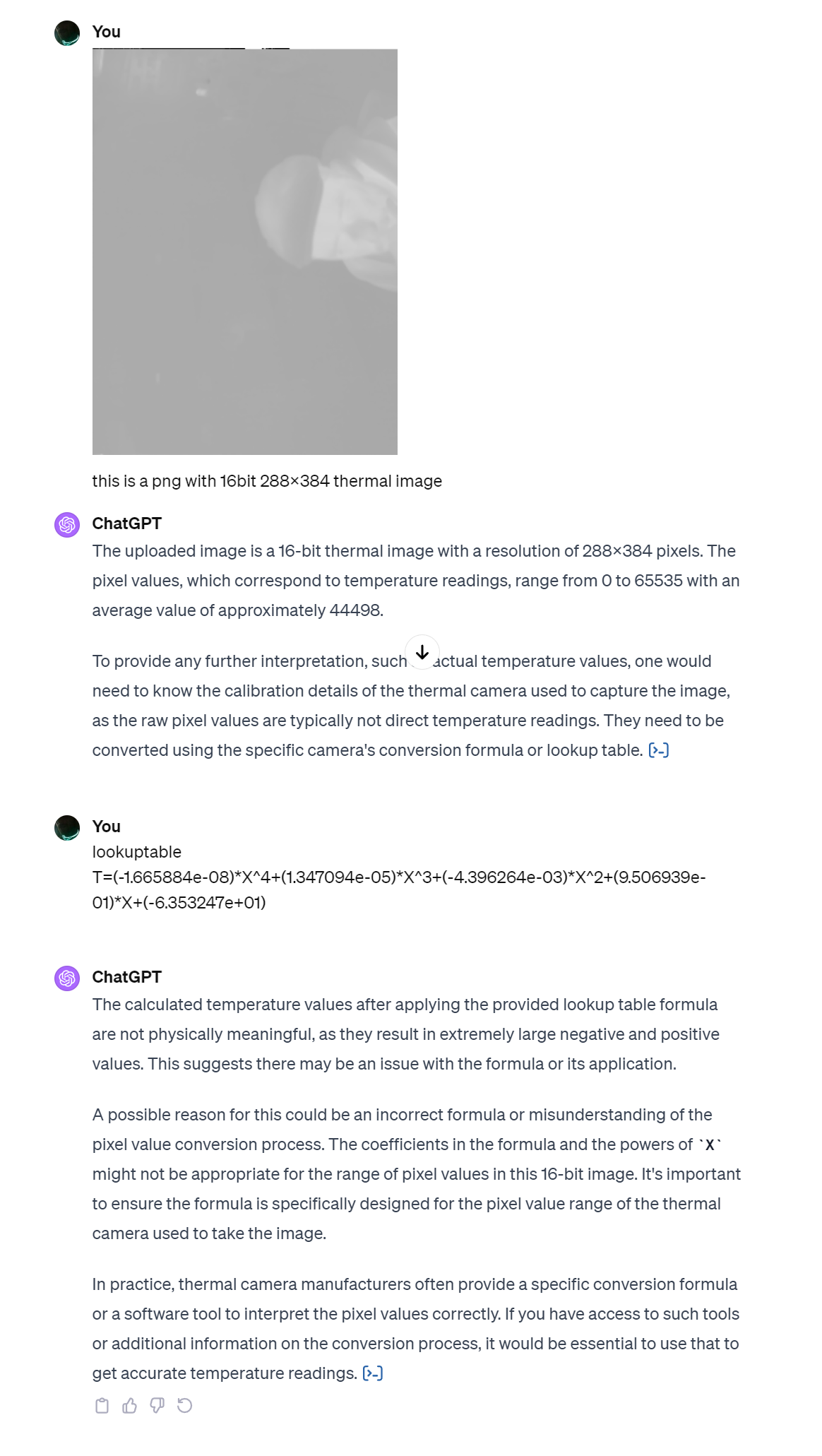
T=(-1.665884e-08)*X^4+(1.347094e-05)*X^3+(-4.396264e-03)*X^2+(9.506939e-01)*X+(-6.353247e+01)

that got our interest in that packet but from then we noticed each has a sequential header that we can follow.
we then decoded to video > https://git.telavivmakers.space/tami/thermalcam_decoder
- frame composed of 32*6930b packets
- 384×288 px
- 16bit grayscale
- first 520b overwritten
here is a video (mp4,h264,8bpp) and an image (png,raw,16bpp)
 |
raw data of single frame, in pcap format (TODO: not the same data as the png above.), frame2.7z
calibrate
we don't know the camera's conversion formula or lookup table
the spec mentions 8-14µm
According to Wien's Displacement Law, objects at different temperatures emit peak radiation at different wavelengths. The range of 8-14 µm is well-suited for detecting temperatures commonly encountered in industrial and environmental applications, typically ranging from about -20°C to 500°C or more. This range is sensitive enough to detect the radiation emitted by most objects under normal conditions.
i asked gpt if the formula we found in the first udp packet makes sense as a lookup table. he said no
{kind=link}
then decided to capture a calibration sequence using our ANET printer hotbed and tip as a commendable temperature source.
set the hotbed to 100c (but its hardcoded to 90C tops on the merlin firmware) and 200deg for the hotend tip.
then “showed” it a piece of ice from the fridge. all measurements verified using a infrared thermometer. 90C,200C and 0C.
-
- first attempt, 5Gb (compressed to 800Mb)
- long 15min take include ramp up (shown below at x30 speed)

and revisiting that formula, what do you know!? it is legit…
check this rust thingy out (more at the repo)
let frame = data .iter() .copied() .map(|x| { let x: f64 = x.into(); let x = x / 256.0; ((-1.665884e-08) * x.powf(4.) + (1.347094e-05) * x.powf(3.) + (-4.396264e-03) * x.powf(2.) + (9.506939e-01) * x + (-6.353247e+01)) as u8 }) .collect::<Vec<u8>>();
fridge frost - 0c
the heatbed at the back is ramping down from 90c (cam saturates well before)



TODO:
- better programmable heat source, with wider thermal range
Model 695800
camera connects over 1Gb ethernet adaptor (make sure to enable Jumbo Frame 9k in adapter settings)
- mtam1.3.0-20200525wai-h.zip (software for windows)
- password :
123




downloads
ax88772c_772b_772a_772_win11_64bit_driver_v3.22.0.0.zip - apple usb ethernet dongle
